61
Open Discussion / RSLogix 5000 Find Priority
« on: October 17, 2022, 12:36:57 PM »
This post is inspired by the question from PLCTalk site


Code: [Select]
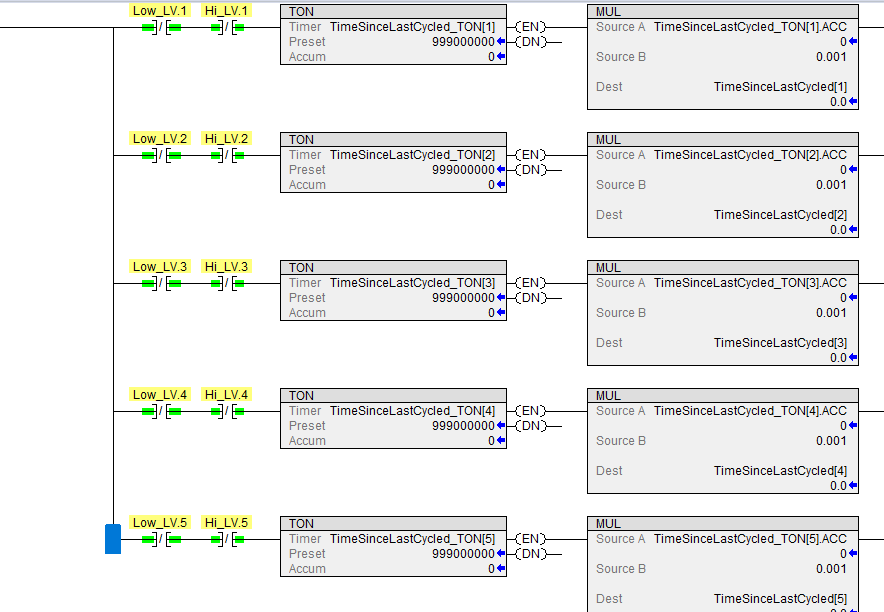
There are 5 Hoppers. Each with 2 level sensors; one is at the 75% full level and the other is at the 25% full level.
I need to fill hoppers that fall below the 25% level (High Priority) first, then any that fall below the 75% level (Normal Priority).
